Odometry - May 29, 2023
Introduction
One programming subject I am interested in for this season is odometry. Recently I found a video describing the basic concept of Odometry, and how it works on a basic level: Intro to Odometry, Part 1
Explanation
First, Odometry usually is implemented with three tracking wheels in a configuration like this:
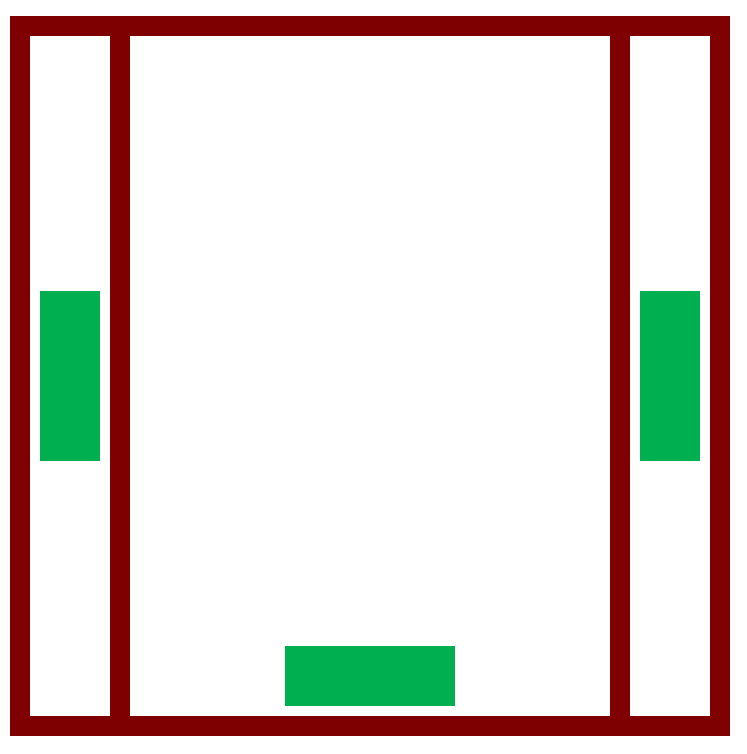
Placing the tracking wheels in this configuration enables us to capture the three components of a robot’s position: X, Y, and Heading.
Additionally, rather than calculating these variables all at once, it is more effective to cumulatively calculate these variables by calculating the change of each variable; simply adding it to your previous value.
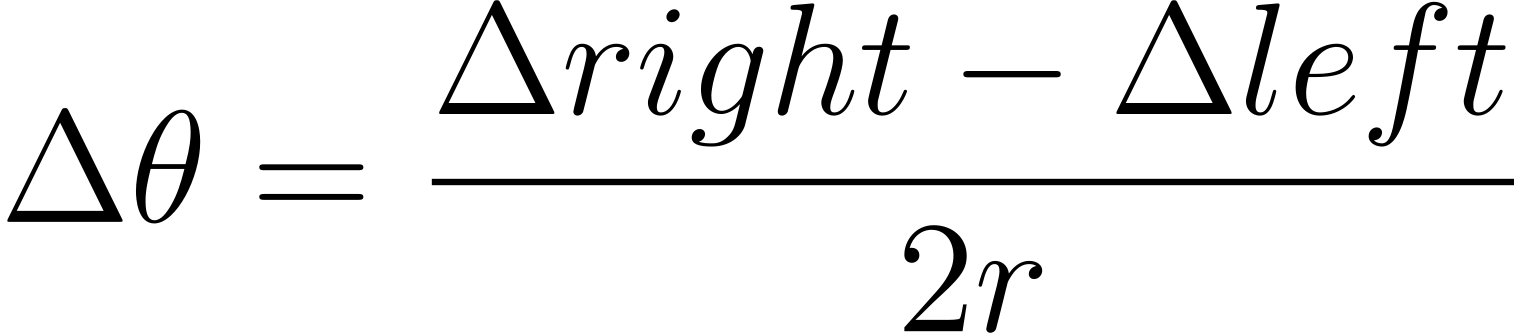
Below, you can see the formulas that would be used to calculate the change in each part of the robot’s position. 𝚫str represents the change in the side-to-side movement of the robot, 𝚫fwd is the change in forward and backward movement of the robot, while 𝚫𝚹 describes the change in heading.


However, these three formulas assume that the robot instantly rotates in place before moving a straight, linear distance. The video below illustrates how the robot is assumed to move with our equations:
This is not how a robot would move in the real world. In the real world, we see a movement that is much more fluid and continuous. The next video below illustrates what a more fluid and realistic robot motion would look like:
Ideally, we would use a set of formulas that describe or mimic this fluid and continuous motion. However, because the real world has countless variables that would be unrealistic to expect to perfectly simulate, we have to settle for close approximations.
One method of more closely approximating the real world is by applying the formulas very frequently (every few milliseconds). As you decrease the time between each update, you begin to approximate the real-world robot position.
Evaluate
Odometry is a very valuable asset for programming autonomous modes. This method of odometry is simple, but we will need to do some testing to determine to what accuracy this method works.
Entry Signatures -
Ayla Clark
Caleb Carlson
Tucker Nielson
Thomas Reid